指導老師:陳宜惠老師 專題成員:許家宏、薛至廷、張翔、蔣明憲、李兆弘、解承逸
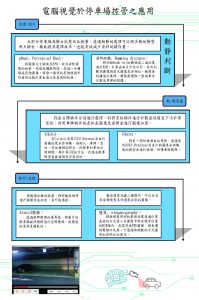
近年來深度學習的興起讓電腦視覺的應用範圍越加廣泛,搭配當前硬體效能助的角色協助停車場控管,將原本需要多種感測器來進行管控的模式由鏡頭取代。由於系統的訊號輸入仰賴影像,在隱私權意識強烈的現代社會中容易引起群眾的疑慮,因此會針對敏感物件加入影像加密來建立使用者對系統的信任,相信未來對於監視器一類的器材進行相關處理措施會是一種主流且普及的作法。
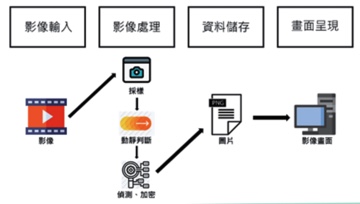
由於python具有良好的生態環境,適合進行可行性的評估開發,因此整套系統主要透過python及相關套件從事開發工作。在影像輸入後會先經由動靜判讀來剔除太過相似的圖片,動靜的判讀是利用轉換成Image Hash來計算漢明距離(Hamming distance),減少後續的計算負擔,取判斷為連續靜止一定次數的圖片作為空位偵測的目標影像,使用Yolov3來進行偵測,並後續進行車牌號碼的提取及圖像加密。
1.能正確且穩定計算停車空位數量 2.能辨識出當前車輛的車牌並記錄 3.對敏感物件進行圖像加密 4.經處理的影像方便人工快速調閱
一、 主要程式使用Anaconda3 Spyder在Python 3.7環境下進行開發,結合後臺資料庫儲存資料,並製作簡單的介面呈現。 二、 模型訓練有使用Google Colab的GPU資源加速訓練YoloV3...等深度學習模型 三、 建立Darknet環境來使用YoloV2針對
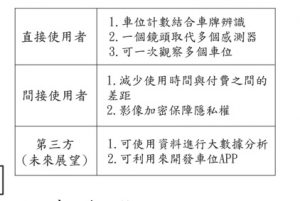
根據使用程度分成直接使用者(車位供給)、間接使用者(車位需求)以及未來可能的第三方。
1.樣本製造:Yolo + Coco Dataset + AOLP Database + Other 2.動靜判斷:pHash + Hamming distance 3.影像加密:Arnold + 偵測座標 4.資訊隱寫:modulo + 寫入RGB